
Answer MET Question 40
Question: Write shorts notes on various types of DC Motors.



Answer: There are three type of DC motors
a. Separately excited
b. Permanent magnet and
c. Self-excited DC motor.
The Self-excited DC motor is of three types:
a. Shunt excited
b. Series excited and
c. Compound excited DC motor.
The Compound excited DC motor is of two types:
a. Cumulative compound - (long and short shunt type)
b. Differential compound - (long and short shunt type)
Separately Excited DC Motor
In case of a separately excited DC motor the supply is given separately
to the field and armature windings. In these types of DC motors, the
armature current does not flow through the field windings, as the field
winding is energized from a separate external source of DC current.
From the torque equation of DC motor we know $\displaystyle \small \mathrm{T\ \ \alpha \ \phi I_a}$
So the torque in this case can be varied by varying field flux ф, independent of the armature current Ia.
Permanent Magnet DC Motor
The
permanent magnet DC motor (also known as a PMDC motor) consists of an
armature winding. A radially magnetized permanent magnets are mounted on
the inner periphery of the stator core to produce the field flux.
The rotor on the other hand has a conventional DC armature with
commutator segments and brushes.
The torque equation of DC motor suggests
Here ф
is always constant, as permanent magnets of required flux density are
chosen at the time of construction and can’t be changed there after. In
this case, the torque of DC Motor can only be changed by controlling the
armature supply.
Self Excited DC Motor
In
case of self excited DC motor, the field winding is connected either in
series or in parallel or partly in series, partly in parallel to the
armature winding. Based on this, self excited DC Motors can be
classified as:
Shunt wound DC motor
Series wound DC motor
Compound wound DC motor
Shunt Wound DC Motor
In
case of a shunt wound DC motor, the field windings are exposed to the
entire terminal voltage as they are connected in parallel to the
armature winding.

The basic voltage equation given by,
$\displaystyle \small \mathrm{E_b = V -I_aR_a}$
[Where, V, Eb, Ia, Ra are the supply voltage, back emf, armature current and armature resistance respectively]
To calculate applied voltage, following realtion can be used:
$\displaystyle \small \mathrm{V = I_{sh}R_{sh} }$
Also
$\displaystyle \small \mathrm{E_b\ \ \alpha\ \ N\phi }$
or
$\displaystyle \small \mathrm{N\ \ \alpha \ \ \frac{E_b}{\phi } = \frac{V-I_aR_a}{\phi} }$
The
shunt wound DC motor is a constant speed motor, as the speed does not
vary here with the variation of mechanical load on the output.
This motor is also called constant flux motor so the torque will be:
$\displaystyle \small \mathrm{T\ \ \alpha \ I_a}$
$\displaystyle \small \mathrm{T\ \ \alpha \ I_a}$
Series Wound DC Motor

In
case of a series wound self excited DC motor or simply series wound DC
motor, the entire armature current flows through the field winding as
its connected in series to the armature winding.
$\displaystyle \small \mathrm{N\ \ \alpha \ \ \frac{E_b}{\phi } = \frac{V-I_a(R_a+R_{se})}{\phi} }$
In
a series wound DC motor, the speed varies with load. And operation wise
this is its main difference from a shunt wound DC motor.
The flux in this motor is proportional to armature current :$\displaystyle \small \mathrm{\phi\ \alpha\ I_a}$
Thus, $\displaystyle \small \mathrm{T\ \alpha\ I_a^2}$
These motors must never run No-Load, the speed will rise very high and mechanical damage will occur.
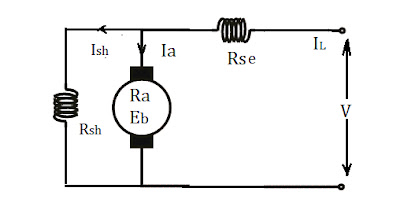
Compound Wound DC Motor
The
compound excitation characteristic in a DC motor can be obtained by
combining the operational characteristic of both the shunt and series
excited DC motor. The compound wound self excited DC motor or simply
compound wound DC motor essentially contains the field winding connected
both in series and in parallel to the armature winding.
The excitation of compound wound DC motor can be of two types depending on the nature of compounding.
Cumulative Compound DC Motor
When
the shunt field flux assists the main field flux, produced by the main
field connected in series to the armature winding then its called
cumulative compound DC motor. $\displaystyle \small \mathrm{\phi\ =\
\phi _{sh} +\phi _{se} }$
Differential Compound DC Motor
In
case of a differentially compounded self excited DC motor i.e.
differential compound DC motor, the arrangement of shunt and series
winding is such that the field flux produced by the shunt field winding
diminishes the effect of flux by the main series field winding.
The net flux produced in this case is lesser than the original flux and
hence does not find much of a practical application.
$\displaystyle \small \mathrm{\phi\ =\ \phi _{se} -\phi _{sh} }$
Both
the cumulative compound and differential compound DC motor can either
be of short shunt or long shunt type depending on the nature of
arrangement.
Short Shunt DC Motor

If the shunt field winding is only parallel to the armature winding and
not the series field winding then its known as short shunt DC motor or
more specifically short shunt type compound wound DC motor.
$\displaystyle \small \mathrm{E_b=V-I_LR_{se}-I_aR_a}$
$\displaystyle \small \mathrm{I_{sh}R_{sh}=V-I_LR_{se}}$
Long Shunt DC Motor

If the shunt field winding is parallel to both the armature winding and
the series field winding then it’s known as long shunt type compounded
wound DC motor or simply long shunt DC motor.
$\displaystyle \small \mathrm{E_b =V-I_a(R_a+R{se})}$
$\displaystyle \small \mathrm{V=I_{sh}R_{sh}}$
Comments
Post a Comment